Sorting & Aggregation Algorithms
执行计划 (query plan)
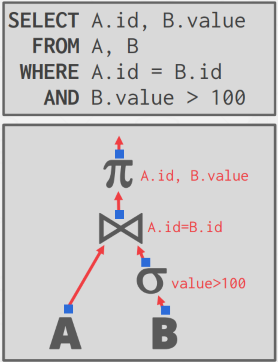
一条 SQL 查询语句首先被解析成抽象语法树,接着构建出对应的执行计划树(query plan tree)或 DAG。一个执行计划树的叶子节点对应底层的数据访问接口(access method),包括通过索引查询或者直接扫描 table 本身等。叶节点将获取的数据传递给上层的节点(operator),每个 operator 对数据进行处理后继续向上传递,直到根节点,将最终结果返回给查询者。数据库系统需要根据一条 SQL 语句,生成最优的执行计划,因为 SQL 只是表明了“我想要满足何种条件的数据”,而数据库要找到最优的执行方式。优化方式大体分为两种:一是选择合适的算法,二是对 query plan 进行重构,比如将 select operator 排在 join operator 之前(谓词下推)
此外,对于面向磁盘的数据库来说,我们不能假设查询结果能够完全放入内存中,需要借助 buffer pool 来保存中间结果。所以衡量一个算法优劣的主要标准不再是以往的时间复杂度,而是 IO 的频次。一个时间复杂度较高,但大多数是 sequential I/O 的算法要优于另一个时间复杂度较低,但多数是 random I/O 的算法。
排序(Sorting)
关系模型中数据是无序的,然而有不同的场景需要进行排序
- 用户指明需要有序的结果(通过 order by)
- 数据库内部将数据排序便于处理,比如去重(distinct),将有序的元组 bulk loading 进 B+ 树效率更高、支持聚合等。
如果数据可以全部塞进内存,那么直接用标准的快排之类的算法就好了,否则就需要考虑磁盘 I/O 的代价,普通的内存排序算法带来的 random I/O 是无法接受的。
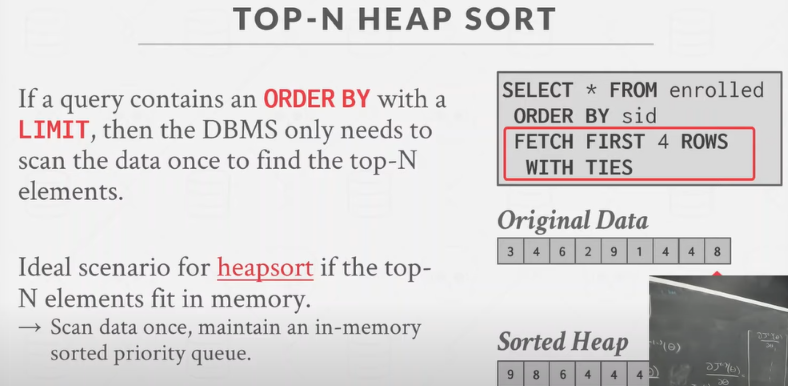
Top-N heap sort
当遇到 order by + limit N 的查询时,数据库不需要将所有数据全部排序。此时最好的情况是当内存装得下 N 个元素时,可以在内存维护一个有序的优先队列(课件里是这么写的,感觉这里的 heap 不是传统的堆的定义,标准的堆只要求根节点大于左右子树,不要求全局有序,这里是全局有序的)。当新插入元素大于队头时,就插入到队头位置,否则插入到其应处的位置,队列满时队尾出队。当所有数据都插入一遍以后,留在队列中的即为 top N。
External Merge Sort
sorted runs 的概念:
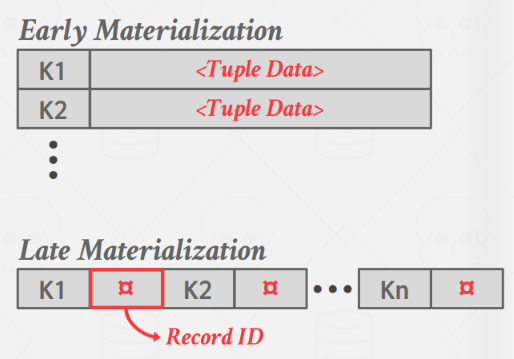
一个 sorted run(归并段) 就是一个有序的 key/value pair 的列表。突然想到 leveldb 中也有 sorted run 这个概念,看来是一个外部归并排序中的专用概念了。这里的 key 很简单,就是要排序的属性(列),value 有两种选择:一是保存整个 tuple 的内容(早物化),一种是只保存对应 tuple 的 record id,直到最后一刻才去磁盘取对应的内容(晚物化)。前者优点是,当要返回数据给客户端时, tuple 的内容已经在内存中了,不用再去磁盘中取,缺点是在排序过程中,可能要将一个 tuple 内容从一个 sorted run 拷贝到另一个 sorted run,导致某一时刻一个 tuple 的内容存在多个副本。后者优点是几乎没有拷贝的开销,但是最终还是要去磁盘取 tuple,列数据库中用的比较多。另外早物化可以通过提前进行 project,只在 value 中保留需要的数据。
外部归并排序的思想是将所有要排序的数据分成多个 runs,分别对其排序,形成多个 sorted runs,即归并段,然后经过多轮合并,将小归并段合成大归并段。整个过程可以总结成两个阶段:
- 排序阶段:该阶段负责创建归并段,每个归并段包含全体数据的一部分,并且归并段内部是排好序的
- 合并阶段:归并段进行合并,生成更大的归并段
2-Way External Merge Sort
2路归并是指在合并阶段的每一轮中将2个归并段合并。设数据总共有 N page 大小,buffer pool 的容量是 B 个 page。在排序阶段(pass 0)中,将每个 page 读入 buffer pool,排好序后输出,这样创建出 N 个 1 page 大小的归并段:

接下来在合并阶段的每一轮(pass)中,选取2个归并段作为输入,用归并算法合成一个更大的归并段。所以2路归并只需要B >= 3 即可(每一轮归并中2个 page 用作输入,1个 page 用作输出)。注意,无论输入的归并段大小有多大,一个归并段只需要1个 buffer pool 中的 page,因为归并算法中2个归并段中的 cursor 是只需要正向移动,不会回溯的,当处理完一个归并段中的1个 page,只需要清空 buffer pool 的这个 page,读入该归并段中的下一个 page 即可。同理,不论输出段有多大,也只需要1个 buffer pool page,当其写满以后溢出(spill)到磁盘就可以清空以写下一个 page 的内容了。
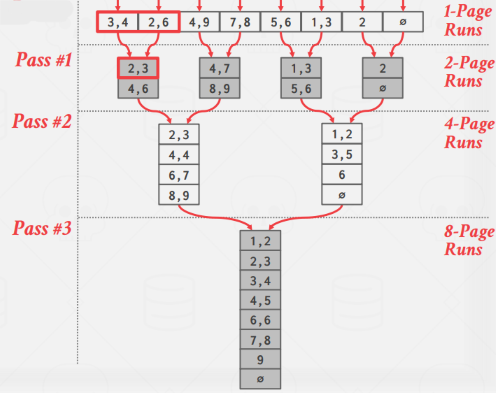
每一轮合并中归并段个数变为上一轮的 1/2,归并段大小变为上一轮的2倍,所以有如下公式:
- 需要的总轮数(趟数) # of passes = 1 + ⌈ log2N ⌉ (1 轮用于生成归并段,⌈ log2N ⌉ 轮用于合并)
- total I/O cost = 2N * (# of passes) (每一轮中,对于每个 page,都需要一次读入和一次写出)
2路归并的局限在于即使有多于 3 个的 buffer pool page,也无法很好地利用。
General External Merge Sort
k路归并是2路归并的扩展,这部分感觉教材 15.4.1 节讲得更清楚一些。设数据总共有 N page 大小,buffer pool 的容量是 B 个 page。在排序阶段,一次读入 B 个 page,排序,输出为一个归并段,循环直到处理完所有数据:
1 | i = 0 |
这样会产生 M = ⌈ N / B ⌉ 个归并段,每个归并段大小为 B 个 page (最后一个可能不足 B)。在合并阶段,每一轮可以合并 (B - 1) 个段(为每个段分配一个输入 page,还预留一个作为输出 page)。现在假定 M <= B - 1,过程如下:
1 | 从M个归并段文件Ri各读入一个块到 buffer pool 中: |
如果第一阶段产生的归并段个数 M > B - 1,意味着没法同时为每个段分配一个 buffer pool page,这时候需要分多趟,每趟依然合并 B - 1 个段。
- 需要的总轮数(趟数) # of passes = 1 + ⌈ logB-1 ⌈ N / B ⌉ ⌉
- total I/O cost = 2N * (# of passes)
使用 B+ Tree index 帮助排序
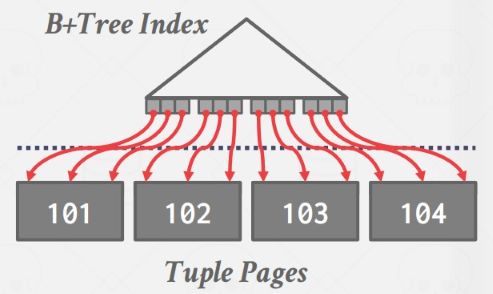
有时如果要排序的属性上已经建立了索引,那么可以考虑直接遍历索引。如果是聚集索引,也就是 B+ Tree 索引中的逻辑顺序和 page 在磁盘上的物理顺序相同,直接遍历索引是很方便的,因为相当于顺序 I/O:
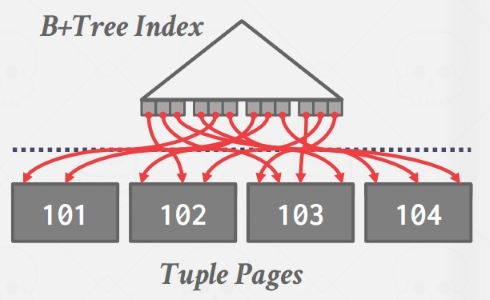
如果是非聚集索引,遍历索引就糟糕透顶了,因为要跟随 B+ Tree 叶节点中的 record id 去找对应的 page,而这些 page 物理顺序和B+ Tree 叶节点顺序不同,相当于 random I/O 了:
聚合(Aggregations)
通常有2种实现选择:
- Sorting
- Hashing
Sorting
Sorting 是很直接的方法,比如下面的例子,将对应列排序,然后从头到尾扫描一遍,遇到与上一个 key 重复的就剔除掉:
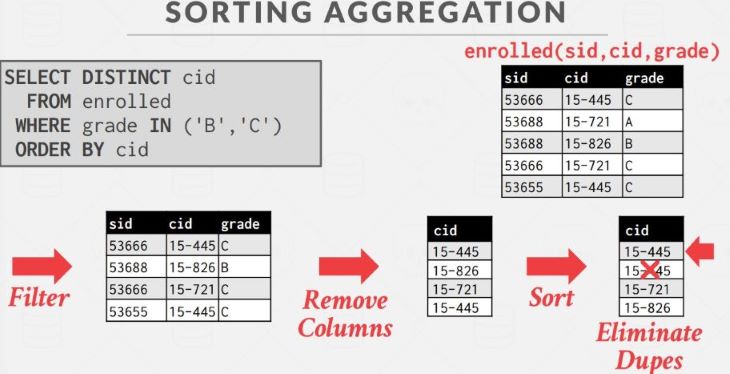
但是如果没有指定 order by,只希望去重,那这里的排序工作就显得冗余了,可以考虑 Hashing
Hashing Aggregations
最简单的方式就是在内存中维护一个临时的 Hash Table,遍历所有数据,对于每条 record,到 Hash Table 中查看其是否存在,根据不同的聚合类型进行不同的操作,比如是 DISTINCT 就抛弃重复的,是 GROUP BY 就执行对应的聚合计算。问题在于当所有数据不能全塞进内存的时候怎么办。
External Hashing Aggregate
基本思想是分两个阶段:
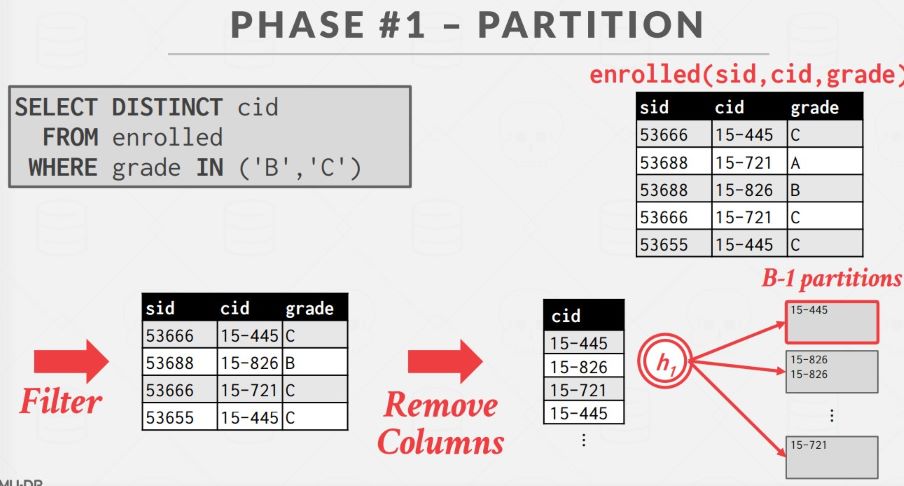
- 阶段一:将全量的数据根据要 GROUP BY 的属性在磁盘上进行分区(partition)
- 阶段二:将各个分区依次调入内存,将分区中的数据插入一个内存 Hash Table 中,如果 Hash Table 满了,就将其丢弃并创建一个新的即可。
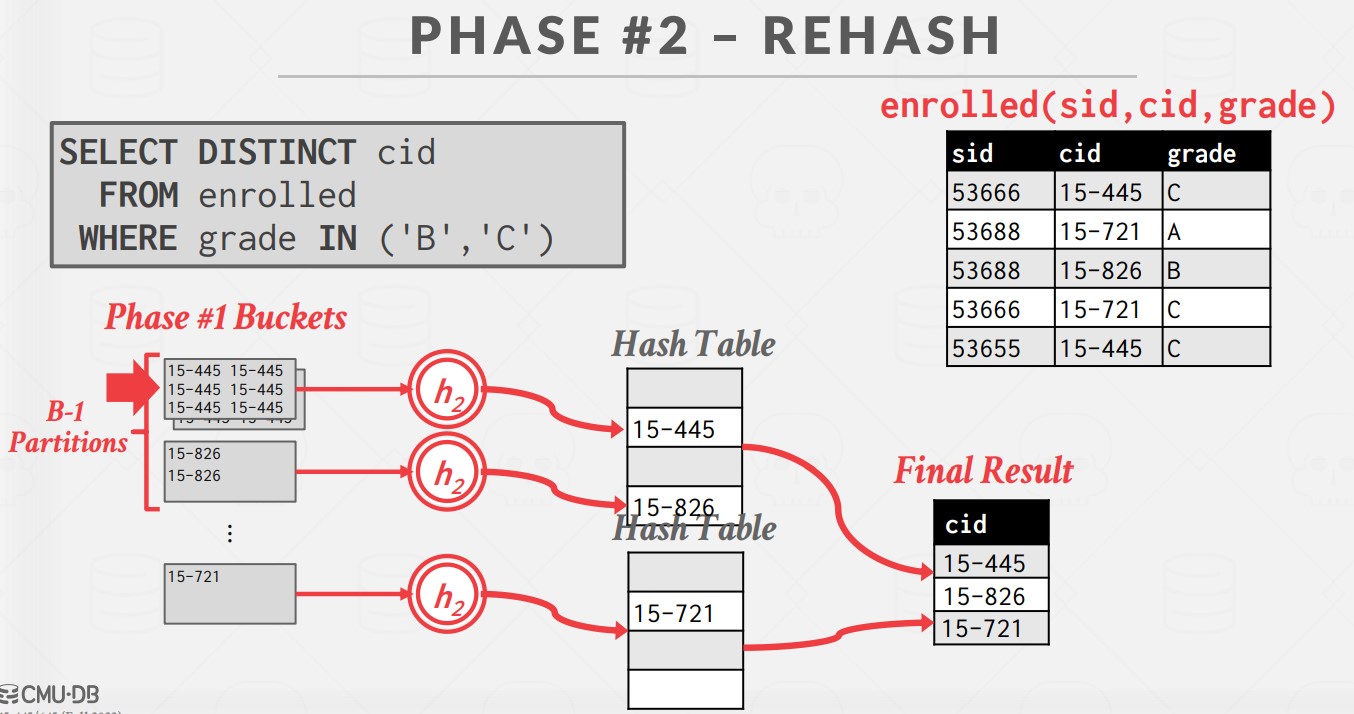
阶段一如下:使用哈希函数 h1,根据目标的 hash key 将 tuple 分割到磁盘中的不同分区,使得所有匹配的 tuple 放在同一个分区中。一个 partition 应该是能够全部放入内存缓冲区的,当缓冲区满会将分区溢出(spill)到磁盘上。
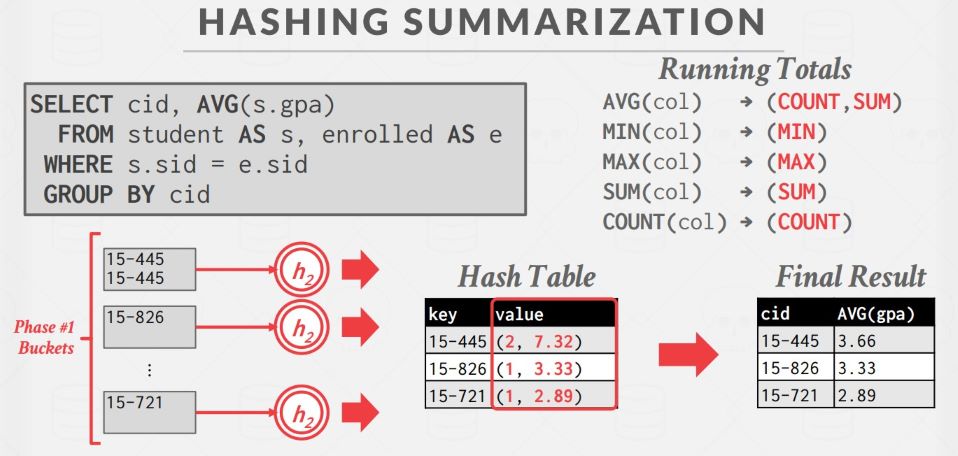
阶段二如下:对磁盘上每个 partition,将其读入内存,使用第二个哈希函数h2,建立一个内存 Hash Table,把匹配的 tuple 聚合在一起。此外,Hash Table 中可以保存 GroupByKey -> RunningValue 的配对,以计算聚合。RunningValue的内容取决于聚合函数。当向 Hash Table 中插入一个新 tuple 时,如果 Hash Table 中已有对应的 GroupByKey,那么就使用聚合函数更新 RunningValue,否则就插入一个新的 GroupByKey→RunningValue 对。